

Miguel Ángel Sotelo, investigador y responsable del proyecto BRAVE, ha dirigido este viernes una presentación a medios de comunicación en la Escuela Politécnica de la Universidad de Alcalá para dar a conocer el proyecto BRAVE.
BRAVE es un proyecto de investigación financiado por la Comisión Europea que ha sido desarrollado por un consorcio internacional cuyos miembros están formados por una serie de empresas, centros de investigación y universidades europeas entre las que se encuentra la Universidad de Alcalá, con la colaboración de la universidad de Sydney en Australia y la universidad americana de Berkeley.
Este proyecto, desarrollado entre 2017 y 2021, está previsto que finalice a finales de este mes. Cuando se realizó la redacción inicial de la propuesta, en 2017, el estado de desarrollo tecnológico de los vehículos de conducción autónoma ya era muy avanzado, de manera que lo que se propuso no fue desarrollar un vehículo autónomo en sí, sino añadir capacidades adicionales al vehículo autónomo que permitieran mejorar la aceptación de los vehículos autónomos por parte de los usuarios.
Las tres líneas en las que han trabajado fundamentalmente en el proyecto BRAVE es la capacidad de predecir el comportamiento de otros vehículos o personas para que un vehículo autónomo pueda comportarse de manera similar a como lo hace un conductor humano y que incluso en algunas tareas pueda superarle.
En segundo lugar, desarrollar una interfaz de comunicación externa, una banda de luz instalada en el frontal del vehículo que le permite establecer un canal de comunicación de interacción con los usuarios de la carretera, tales como peatones, ciclistas u otros conductores.
El tercer objetivo es contribuir al desarrollo de estándares que permitan desplegar la regulación necesaria para la implantación sistemática y masiva de vehículos autónomos en el mercado.
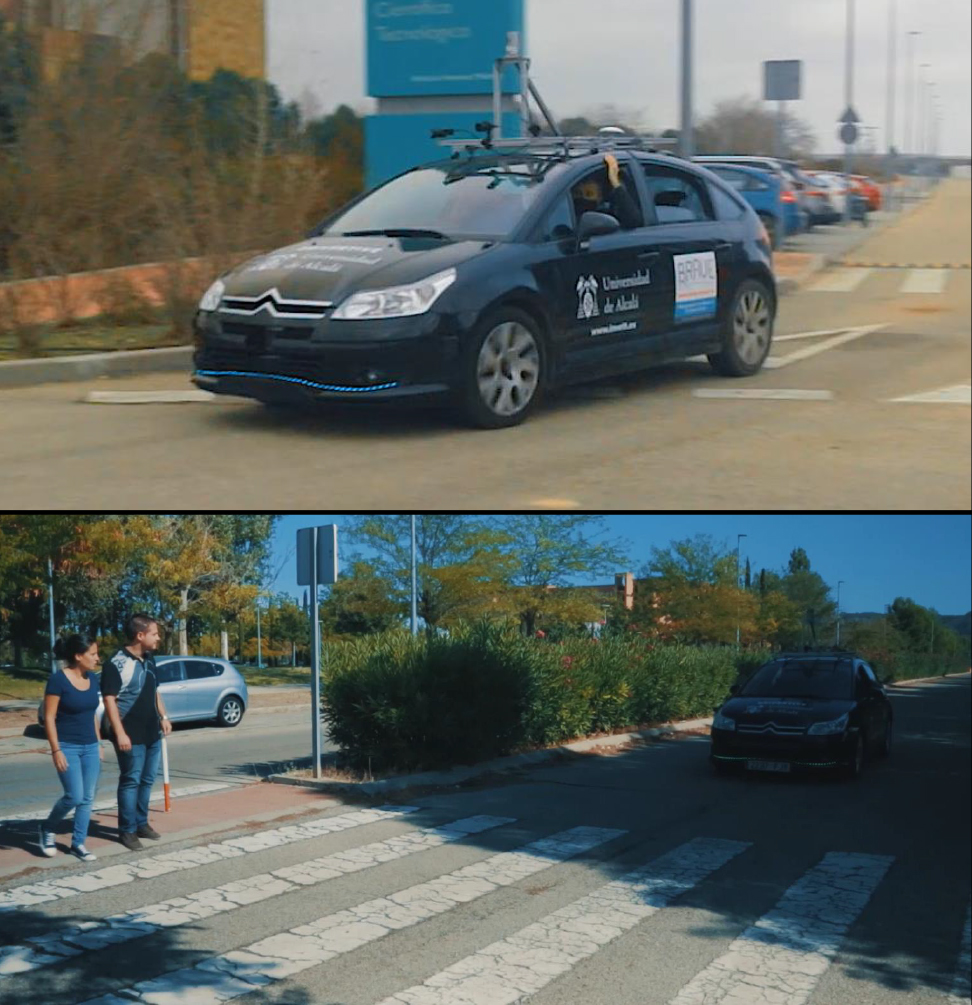
En el siguiente vídeo se puede apreciar cómo es por fuera el vehículo Drivertive, prototipo de lo que podría ser «el presente de la conducción autónoma» en un plazo de unos cinco años:
Hablamos con el responsable del proyecto
Miguel Ángel Sotelo, investigador y responsable del proyecto BRAVE, financiado por la Unión Europea, tuvo unos minutos para explicar a Dream Alcalá algunos de los detalles más interesante de este proyecto internacional en el que la Universidad de Alcalá ha jugado un importante papel.
Cómo predice el comportamiento este vehículo autónomo
Uno de los objetivos principales que se busca en este proyecto es dotar a los vehículos autónomos de la capacidad para anticipar las intenciones de peatones, ciclistas y otros conductores, cambios de carril, etcétera.
Un ejemplo concreto de ese comportamiento predictivo lo podemos encontrar en las imágenes inferiores (y sobre todo en el vídeo final de esta información), en los que se ve a unos peatones esperando para cruzar la carretera en un cruce peatonal mirando al vehículo que viene de frente, para ver si este vehículo de alguna señal de ceder el paso. Lo primero que hace el sistema es identificar la presencia de esos peatones, es decir conocer que existen peatones esperando para cruzar y a continuación, también mediante técnicas análisis de imagen, analizar la dirección de la mirada de los mismos para comprobar si dichos peatones están buscando contacto visual con el conductor, ya que esto es una clara evidencia de la intención que dichos peatones pueden tener de cruzar la calle o no.
El vídeo también muestra un segundo tipo de comportamiento predictivo que se basa en la detección o anticipación de cambios de carril. Después de realizar experimentos exhaustivos con un total de 72 voluntarios, se ha llegado a la conclusión de que el sistema desarrollado en el proyecto es capaz de anticipar los cambios de carril con aproximadamente 400 milisegundos de anticipación con respecto a las capacidades promedio de un conductor, casi medio segundo de diferencia, lo cual puede significar la diferencia entre la vida y la muerte en una situación crítica carretera.
Bandas de luz de colores para comunicarse con el entorno
La interfaz externa con la que cuenta el vehículo autónomo Drivertive de la Universidad de Alcalá se basa en una banda de luz que permite informar a otros usuarios sobre el estado del vehículo autónomo. Esta banda puede adquirir el color luz turquesa cuando el vehículo está funcionando en modo autónomo, ya sea arrancando en modo crucero o parado, y esta misma interfaz adquiere el color verde cuando el vehículo se detiene para ceder el paso a peatones, ya sea en un cruce peatonal o en cualquier otra circunstancia similar.
Las capacidades de las bandas lumínicas del vehículo autónomo Drivertive desarrolladas en el proyecto BRAVE hacen que se utilice la luz turquesa en tres modos: moviéndose de izquierda a derecha al arrancar, estáticas cuando está en modo crucero y parpadeantes cuando el vehículo se está deteniendo.
La explicación de BRAVE en detalle
Si te interesa conocer en más detalle cómo la tecnología desarrollada por la Universidad de Alcalá, no te pierdas la explicación con ejemplos de Miguel Ángel Sotelo, investigador y responsable del proyecto BRAVE.
Más información
Sigue disfrutando de Dream Alcalá:
- Telegram: Recibe nuestras noticias y contenido exclusivo (clic aquí).
- Newsletter: Recibe cada tarde un correo con nuestras últimas noticias (clic aquí).
- YouTube: Suscríbete para ver nuestros mejores vídeos (clic aquí).